設備管理や制御には、加速度計が利用されることがあります。
近年、スマホにも搭載され歩数計に利用されたり、アップルウォッチなどでは人の動作の検知と異常発生時の連絡まで行うと。
その測定原理を少し調べてみました。
まず、ニュートン力学から、
運動方程式 F=mα (力=質量x加速度)
この関係から、力を測定できると加速度が逆算できることが解ります。
力の測定には、バネの変位や圧電素子が使えます。
バネの位置変化量測定には、静電容量が電極間の距離で変わることも利用できます。
ROHM TECH WEB から引用でご紹介
加速度センサの動作原理
この図は、加速度センサの一般的な測定方式を模式化したものです。図のようにバネにつながったおもりは、このボックスを例えば左上に移動させた場合、つまり加速度が発生した場合、おもりの位置が変化します。この位置変化を捉えることで加速度を導出します。
右側の図は、おもりの位置から傾きを測定する原理を示しています。実際の静止状態は、重力1Gがかかっています。ボックスが傾くと、おもりの位置が変化して重力方向がわかるので、それを傾きとして検出できます。

一般に、測定範囲が20G以下のものを低G加速度タイプ、20Gを超えるものを高G加速度タイプ
小型携帯機器やIoT機器に対しては、小型化やインテリジェント化に向く、半導体のMEMS(Micro Electro Mechanical Systems)技術を使った加速度センサが多く使われています。MEMS加速度センサは一般に、加速度を検出する素子と、素子からの信号を扱いやすいように調整する信号処理回路で構成されています。また、主な方式として、静電容量方式、ピエゾ抵抗方式、熱検知方式があります。
| 方式 | 原理 | 特徴 |
|---|---|---|
| 静電容量検出方式 | 素子の固定電極と可動電極から構成され、加速度による可動電極の変位による電極間静電容量を検出。 |
|
| ピエゾ抵抗方式 | バネで支えられた錘の変位を、バネに配置したピエゾ抵抗素子により検出。 |
|
MEMS静電容量方式加速度センサ
MEMS静電容量方式加速度センサは、姿勢制御など広く使われているので、動作原理について実際のMEMS静電容量式加速度センサの素子部を示してもう少し具体的に説明します。下図は、SEM(走査電子顕微鏡)の画像です。

このセンサ素子は、Siで作られた固定電極と可動電極、スプリングから構成されています。加速度が加わっていない状態では、固定電極と可動電極の間の距離は同じです。加速度がかかると可動電極が移動し、固定電極との位置関係に変化が生じ、電極間静電容量が変化します。発生した容量変化は内部の信号処理回路(ASICなど)で電圧変換され、それを基に加速度を算出します。
加速度センサの選択に関しては、同じ加速度センサでも種類によってそれぞれ特徴があるので、検出原理を理解して用途に応じた選定をすることが重要です。
注:静電容量とは、コンデンサーの特性で電気を貯める量で、下記の関係があります。キーエンスの解説サイトから引用でご紹介
上記の図では、固定電極に挟まれた可動電極の位置が変化すると、C1の静電容量が減少し、C2の静電容量が大きくなり、差が発生します。
静電容量:平行導体板の場合
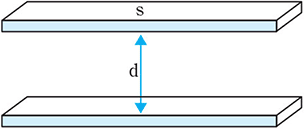
面積Sの2枚の導体板が平行にあり間隔dの場合、静電容量Cは、ε0S/d[F]で表すことが出来る。
図のように、2枚の導体板が平行にあり、面積S[m2]、間隔d[m]のとき、それぞれに+Q、-Qの電荷を加えた場合に、その電極間に作用する電界強度は、
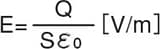
(電荷密度σ=Q/S)
となり、電極間の電位差[V]は、
V=Ed=dQ/Sε0
したがって、静電容量は、以下になります。