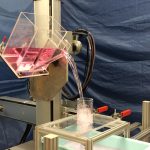
実験用取鍋傾動式自動注湯機
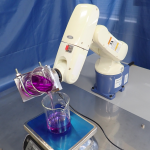
垂直多関節ロボットによる注水作業
| 1.研究室名 | 山梨大学 工学部 機械工学科 動的システムデザイン研究室(野田研究室) |
|---|---|
| 2.所在地 | 〒400-8511 山梨県甲府市武田四丁目3-11 |
| 3.研究室URL | |
| 4.連絡先メールアドレス | noday(a)yamanashi.ac.jp |
| 5.研究室の概要 | 「動的システムの解析と制御」を基盤技術として社会や人に役立つ制御システム開発を行っています。鋳造関連分野では、自動注湯機の数理モデル解析と高速高精度化を実現する注湯制御システム,VR技術による技能トレーニングシステムの研究開発を行っています。また、フーリエ変換やウェーブレット変換などの時間周波数解析を用いた振動現象解析とその振動抑制制御手法の開発を行っています。 |
| 6.キーワード | 設備,自動化,ロボット,VRトレーニング |
| 7.研究室の人員構成 | 教授:野田善之 (2022年6月現在) |
| 8.所属学会 | 日本鋳造工学会/日本機械学会/計測自動制御学会/日本ロボット学会/IEEE |
| 9.鋳造技術関連の 主な研究テーマ |
・自動注湯機における注湯制御システムの研究開発 |
| 10.鋳造関連の 主な研究設備,装置 |
・実験用取鍋傾動式自動注湯機 |
| 11.技術相談が受けられる分野 /連携可能な分野 |
鋳造設備の自動化、自動化設備の高速・高精度化、振動解析 |
| 12.設備・装置の使用の可否 /依頼試験の可否 |
設備・装置の使用 : 可 (備考 : )
依頼試験 : 可 (備考 : )
|
| 13.産学連携状況 | 新東工業(株) |
| 14.その他特記事項 (特許・受賞等) |
日本機械学会学術奨励賞 ( 2008年 )、 日本鋳造工学会論文賞 ( 2009年、2019年 )、日本鋳造工学会優秀論文賞(2015年)、日本鋳造工学会日下賞 ( 2010年 )、ファナックFAロボット財団論文賞 ( 2011年 ) |
| 15.記載日 | 2022年6月7日 |
